Introduction
This is a quick how-to explaining everything you need to get started using your
Flexiforce Pressure Sensor. This example uses the 25lb version, but the concepts learned apply to all the Flex sensors.
Requirements
Necessary hardware to follow this guide:
You'll also need the Arduino IDE for programming.
Hardware
The Flexiforce Pressure Sensor is essentially a variable resistor.
When no pressure is applied, the resistance between the two outer leads
is incredibly large, probably greater than 10 Mega Ohms (more than my
meter can measure). When pressure is applied, the resistance measured
between the outer leads lowers until you've reached the max pressure
it's intended to measure. In this case that's about 25 lbs of pressure,
and the current Flexiforce Pressure sensor I'm using measures about 50K
Ohms when given that max amount of pressure.
You can test the range of your sensor using a
multimeter.
Just attach the two outer leads to the multimeter and set the meter to
measure resistance. Then squeeze the sensor and watch the resistance
value change.
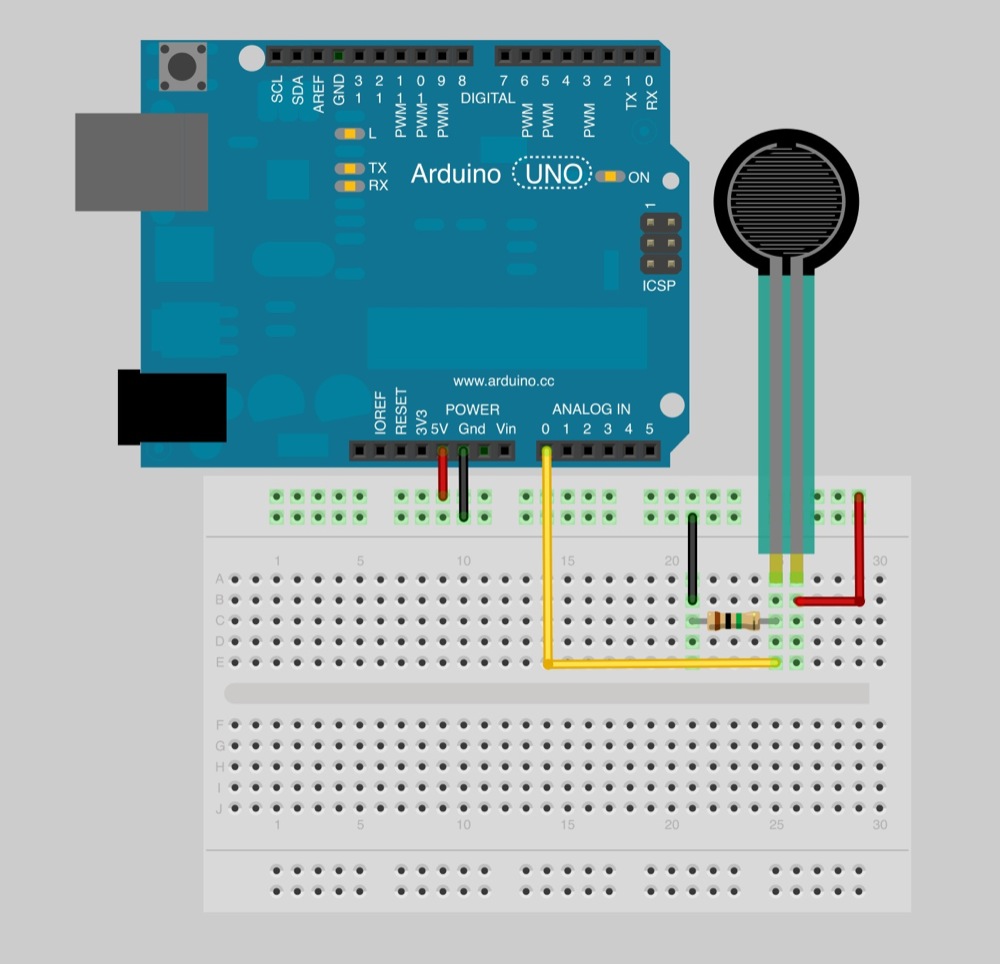
Now, let's read values with an Arduino. To do this, we create a
voltage divider circuit with the Flexiforce sensor and an extra
resistor. I picked 1M Ohm in this example because it's about in the
middle of the Flexiforce sensor's dynamic range. Many other similar
values could work as well.
Connect 5V to one side of the voltage divider, and GND to the other.
In the middle, where the Flexiforce sensor and the resistor connect,
connect one of the analog-in pins of the Arduino with a jumper wire. In
this case I used pin A0. Here is a
Fritzing diagram of the setup:
Fritzing Wiring Diagram
*Note*: The sensor in the image doesn't look exactly the same as
the Flexiforce sensor, but very close. The actual Flexiforce sensor has
a larger surface area.
Software
Now that you have your circuit wired and ready, it's time to write
some very basic Arduino code. This code is almost exactly the same as
Arduino's standard
AnalogReadSerial example. Let's take a look to see what it's doing:
// Flexiforce quick start example
// Reads A0 every 100ms and sends voltage value over serial
void setup()
{
// Start serial at 9600 baud
Serial.begin(9600);
}
void loop()
{
// Read the input on analog pin 0:
int sensorValue = analogRead(A0);
// Convert the analog reading (which goes from 0 - 1023) to a voltage (0 - 5V):
float voltage = sensorValue * (5.0 / 1023.0);
// Print out the value you read:
Serial.println(voltage);
// Wait 100 milliseconds
delay(100);
}
The code is simply running in a small infinite loop every 100ms, or
10 times a second. In each pass through the loop, it measures the
voltage on pin A0 and returns a corresponding value between 0 and 1023. 0
represents ground in this case and 1023 indicates A0 is sitting at 5
Volts. For other numbers in between, we can figure out the voltage by
multiplying the measured number by the fraction, 5.0 / 1023.0. We then
spit this value back over the Serial port, we can watch the values
change in real time.
Go ahead and try. Make sure you have the hardware connected
correctly. Program the Arduino, open up the Arduino Serial Monitor (make
sure it's using 9600 baud), and watch the voltage values change as you
press and release the Flexiforce Pressure Sensor.
Conclusion
Now you know how to use the Flexiforce Pressure Sensor. Believe it
or not, there are many different analog sensors where you can use what
you learned here and collect data the exact same way. Now it's all up to
you to use these types of products however you imagine. If you have any
other questions or comments, please drop them in the box below. Enjoy!
https://www.sparkfun.com/tutorials/389